
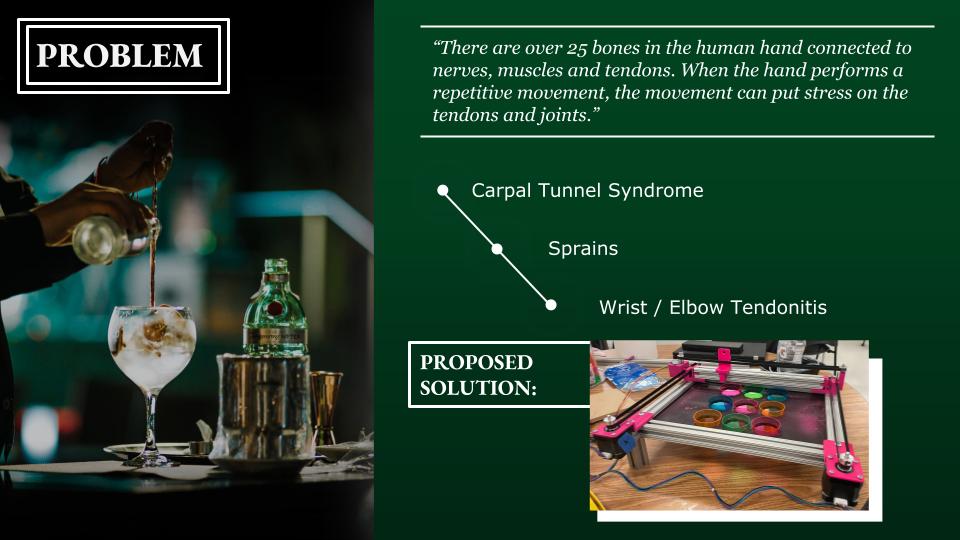
The smaller stepper motor (used on the actuator end rail) was chosen for its light weight to minimize the impact of weight on the bottom linear stages, but it was unable to move fast enough to our liking and only rotated in the CW direction. While the CW rotation restriction did not impact the pouring of shots because we calibrated the Marlin code so that the shots poured in the shape of a "2" so the top rail only needed to move in one direction, it was unable to return the rail back to "home" position automatically.
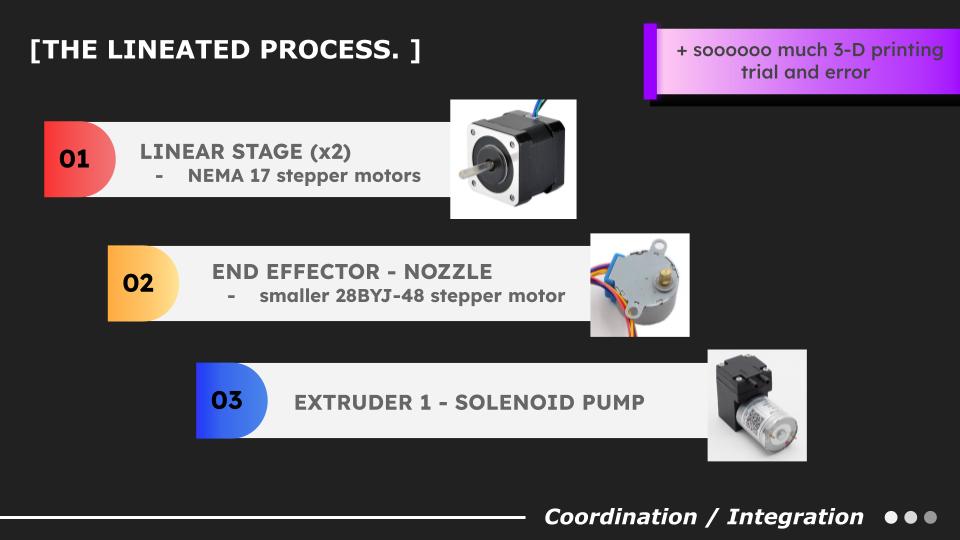
Additionally, due to the changing pressure as the level of liquid in the reservoir decreased, the amount of liquid poured started to decrease slightly. This would be fixed through fluid analysis / trial and error to increase the time the pump ran for each shot. The liquid would also drip out of the nozzle as the pulley moved in between shots, despite a slight pause included so most of the drip would occur in the shot glasses. This could be remedied by putting the shot glasses directly next to each other. They were placed apart to give a chance for the solenoid pump to rest to avoid overheating.
Overall, with the limitations imposed by the components provided within budget and time constraints as full time students, the project performed the needed objections to our satisfaction.